
استپ موتور چیست و چگونه کار میکند؟
استپ موتور چیست و چگونه کار میکند؟
استپر موتور ( Stepper Motor ) یا استپ موتور ( Step Motor ) یا موتور پله ای یک موتور براشلس (Brushless ) الکتریکی DC است که یک دور کامل ( ۳۶۰ درجه ) را به تعدادی پله یا استپ مساوی تقسیم می نماید. کنترل موقعیت موتور پله ای برای رفتن به یک پله خاص یا ماندن در آن پله بدون استفاده از سیستم فیدبک می باشد و این نشانه دقت بالای این موتور ها است.
درون استپ موتور چندین سیم پیچ وجود دارد که در گروه هایی به نام فاز قرار داده شده اند. با عبور الکتریسیته از هر یک از این فازها ، موتور با سرعت یک گام در واحد زمانی به چرخش در می آید.
این موتور ها در هر پله یا استپ به میزان خاصی بر حسب درجه دوران می کنند ، به عنوان مثال محور استپ موتور ۲۰۰ استپ در هر استپ 8/1 درجه دوران می کنند.
با کنترل کردن گام های استپ موتور توسط یک کامپیوتر، میتوان کنترل سرعت و موقعیت بسیار دقیقی به دست آورد. به همین دلیل استپ موتورها گزینه هایی مناسب برای استفاده در پروژه هایی هستند که نیاز به کنترل حرکت دقیق دارند. استپ موتورها در اندازه ها و انواع مختلف با مشخصات الکتریکی متفاوت برای کارهای صنعتی مختلفی وجود دارند که بر حسب نیاز می توان یکی از آن ها را انتخاب و مورد استفاده قرار داد.
 اجزاء تشکیل دهنده استپ موتورها :
اجزاء تشکیل دهنده استپ موتورها :
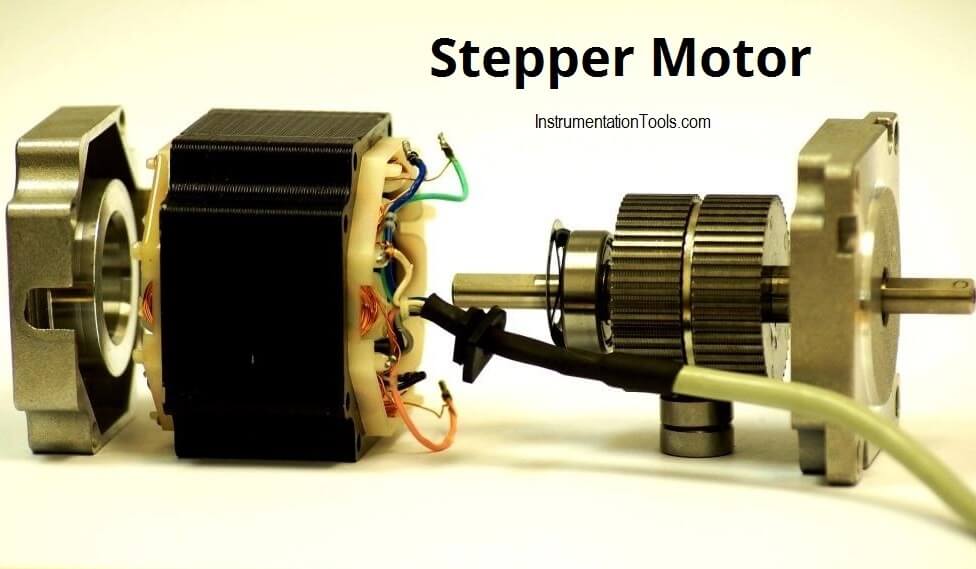
استپ موتور از 3 بخش استاتور، روتور و قاب های سر و انتها تشکیل شده است.
استاتور: در قسمت استاتور تعدادی سیم پیچ با هم گروه بندی شده اند. مثلا در استپ موتور دو فاز دو گروه سیم پیچ میبینید که از داخل با هم اتصال دارند که نهایتا چهار سیم از آن ها بیرو ن آمده که دو به دو به هر کدام به گروه سیم چیپ ها متصل اند. در استپ موتور سه فاز شش سیم خروجی خواهید داشت و در استپ موتور 5 فاز 10 سیم خروجی . البته این نکته هم وجود دارد که در برخی استپ موتورها این ده سیم یا شش سیم از داخل با یکدیگر سری یا موازی میشوند و بیرون می آیند.
روتور: روتور معمولا بسته به اینکه گشتاور استپ موتور و طول استپ موتور چقدر است تعداد طبقات کمتر یا بیشتری دارد. مثلا در یک استپ موتور که 4 طبقه است اگر میخواهد طول بیشتری داشته باشد میتواند تا 8 طبقه شود که در نتیجه آن گشتاور استپ موتور بیشتر میشود یا میتواند طول آن به 2 طبقه کاهش پیدا کند که در آن صورت نیز گشتاور استپ موتور نصف خواهد شد.
قاب استپ موتور: در سرو ته استپ موتور ها بر خلاف باقی موتورها که از بوش ،ذغال و بلبرینگ وجود دارد در استپ موتور در دو طرف فقط از بلبرینگ استفاده شده است که علت عمر بالای استپ موتور هم همین موضوع است یعنی اثری از ذغال نمیبینید که بخواهد تمام شود یا اینکه بوشی وجود ندارد که بوش بخواهد جا بیندازد و خراب شود و عملکرد استپ موتور با مشکل مواجه شود.
میکرواستپ در درایور استپ موتور به چه معناست؟
گام پیش فرض استپ موتورها به طور عمومی یا 1.8 درجه است (دو فازها)، یا 1.2 درجه (سه فازها) و یا 0.75 درجه (پنج فازها) و این به این معنی است که با ولتاژدهی فاز بعدی نسبت به فاز قبلی، این گام توسط استپ موتور طی خواهد شد.
میکرواستپ در درایور استپ موتور چگونه عمل می کند؟
درایورهای میکرواستپ بجای آنکه ولتاژ را به صورت صفر و یک به فازهای متوالی موتور تحویل دهند، آن را تقسیم مینمایند ، به عنوان مثال در میکرواستپ با تقسیمات 16، در مرحله اول 1/16 ولتاژ را به فاز اول و 15/16 آن را به فاز دوم تحویل می دهند. در مرحله دوم 2/16 را به فاز اول و 14/16 را به فاز دوم. و به این ترتیب رزولوشن حرکت موتور را ریزتر و دقیقتر می کنند.
چه تأثیری دارد؟
این امر باعث می شود دقت حرکت استپ موتور بالا رفته و در عین حال لرزش استپ موتور به مقدار زیادی کنترل شود.
چه معایبی دارد؟
در میکرو استپ های بالا، باعث کاهش گشتاور موتور شده و احتمال گم کردن پالس نیز زیاد می شود.
مقایسه انواع استپ موتور از لحاظ مشخصات فنی
منظور از استپ موتور 2 فاز ، استپ موتور 3 فاز و استپ موتور 5 فاز چیست؟ چه تفاوتهایی با هم دارند؟ موارد استفاده هر کدام کجاست ؟
مقایسه انواع استپ موتور از لحاظ کاربرد
- استپ موتورهای 3 فاز بیشتر در حرکتهای با رفت و برگشت زیاد و سریع به کار می روند.
- استپ موتورهای 5 فاز در حرکتهای با سرعت و دقت بالا به کار گرفته می شوند، تا جاییکه یک استپ موتور 5 فاز با درایور میکرواستپ می تواند دقتی تقریبا معادل یک سرو موتور 17 بیتی داشته باشد.
- استپ موتورهای 5 فاز با درایور معمولی (Full/Half) لرزش بسیار کمی دارند و جز در موارد با دقت زیاد، نیازی به درایور میکرو استپ ندارند.
- استپ موتور های دو فاز با درایور معمولی (Full/Half) لرزش زیادی دارند و می بایست برای حذف لرزش آنها از روشهای مکانیکی استفاده نمود.
به صورت کلی، اگر در پروژه های خود از سرو موتور (+گیربکس) استفاده می کنید، ولی به سرعت بالایی نیاز ندارید (کمتر از 500 دور در دقیقه) و گشتاور مورد نیازتان نیز کمتر از 30N.M است، می توانید جهت کاهش هزینه های خود به استپ موتور فکر کنید.
مزایای استپ موتورها :
- کنترل دیجیتالی ساده
- فاقد خطای تجمعی
- توقف ناگهانی بدون آسیب
- بدون جاروبک
- بدون نیاز به فیدبک پایدار
- ساختمان مکانیکی ساده
- راهاندازی ساده و ارزان
معایب استپ موتور ها :
- توان خروجی محدود
- دوران با پله ثابت
- قادر به تغذیه بار با اینرسی زیاد نیست
- پرش و نوسان زیاد
- راندمان کم
کاربرد های استپ موتور :
هرچند کاربرد استپر موتور ها امروزه بسیار گسترده است اما استپ موتور ها را می توان در وسایلی مانند CNC ها ، پرینتر های ۳ بعدی ، پرینتر های جوهر افشان ، اسکنر ها ، پلاتر ها ، فلاپی درایو ها ، دی وی دی درایو ها ( DVD Drive ) ، لنز بعضی از دوربین های دیجیتال یافت که البته این موارد گوشه ای از کاربرد استپ موتور هاست.
به طور کلی برای سیستم هایی که نیاز است موقعیت دقیق ( افقی ، عمودی ) یا زاویه دقیق را تعیین کنیم می توانیم از استپ موتور ها استفاده نماییم. استپ موتور ها در ساخت ماشین های عددی مانند ماشینهای CNC در صنعت استفاده های فراوانی دارند.
همچنین استپ موتور ها در صنایع رباتیک نیز کاربرد وسیعی برای ساخت بازو ها و سایر اجزای دقیق ربات را به خود اختصاص داده اند. استپر موتور در صنایع خودروسازی نیز کاربرد دارد و یکی از موارد کاربرد استپ موتور در خودروها کنترل میزان دور موتور ( گاز ) ، افزایش دور موتور هنگام استفاده از کولر ، جلوگیری از کاهش ناگهانی دور موتور و در کل ایجاد تعادل و کنترل دور موتور می باشد.
مقایسه استپ موتور و سروو موتور (Stepper Vs. Servo)
انتخاب بین سروو موتور و استپ موتور می تواند یک چالش باشد که شامل بالانس بین فاکتورهای مختلف طراحی می باشد:
هزینه آن ، گشتاور، سرعت ، شتاب و دقت کارکرد همگی در انتخاب موتور برای کار شما تعیین کننده هستند.
تفاوت اولیه بین سروو موتور و استپر موتور
سروو موتور و استپر موتور در دو موضوع عمده با هم تفاوت دارند، در ساختار اولیه شان و اینکه چگونه کنترل می شوند.
استپر موتور تعداد زیادی قطب دارد ، جفت های مغناطیسی قطب های شمال و جنوب، بوسیله آهن ربای مغناطیسی یا جریان الکتریکی (معمولا 50 تا 100 قطب) تولید می شوند. در مقایسه سروو موتور قطب های کمتری دارد (معمولا بین 4-12 قطب). برای هر قطب یک نقطه استپ برای شفت موتور وجود دارد. تعداد بیشتر قطب ها به استپر موتور اجازه می دهد تا بین هر قطب دقیق تر و صحیح تر حرکت کند، بنابراین به استپر موتور اجازه می دهد که بدون استفاده از فیدبک برای بسیاری از کاربردها مورد استفاده قرار گیرد. سروو موتورها اغلب نیاز به انکدر دورانی دارند تا موقعیت شفت موتور را شناسایی کنند ، بخصوص اگر جابجایی های دقیق مورد نیاز باشد.
هدایت کردن سروو موتور به یک موقعیت دقیق با استفاده از سروو موتور بسیار ساده تر است. با یک استپر موتور یک پالس تکی درایو، شفت موتور را یک گام، از این قطب به قطب بعدی، حرکت می دهد. چون اندازه یک گام در یک موتور ثابت استريال حرکت به یک موقعیت دقیق تنها بسته به فرستادن تعداد پالس های صحیح دارد.
در مقابل، سروو موتورها اختلاف بین موقعیت کنونی انکودر و موقعیتی که به آنها فرمان حرکت به آن موقعیت داده شده است را می خوانند و جریانی که نیاز است به موقعیت دلخواه برسد ارسال می کنند. با شرایط موجود امروزه، کنترل استپر موتورها به مراتب ساده تر از سروو موتور های می باشد. سرعت سرو موتور ها تا 3000 دور بر دقیقه میرسد ولی استپ موتور حداکثر تا 300 دور بر دقیقه میباشد که در سرو موتورها گشتاور خطی بوده و در سرعت بالا افت گشتاور وجود ندارد ولی در استپ موتور با بالارفتن سرعت گشتاور کاهش می یابد.
جهت خرید انواع استپ موتور کلیک کنید






{kind=link}
{kind=link}